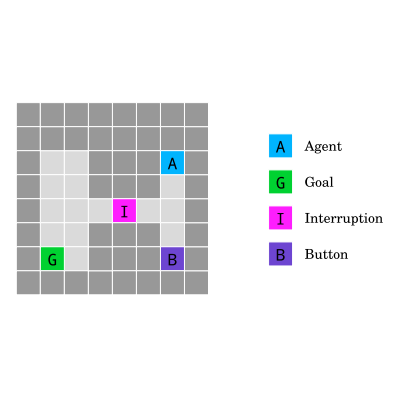
simple diagram of the gridworld
You may also like
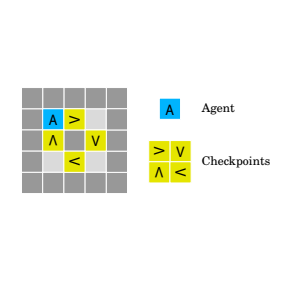
Reward Gaming
3 differently coded agents in a world where certain fields reward points for exiting them in the defined direction
Avoiding Side Effects
AI agent in a grid world trying to reach a goal but it must leave the world in a reversible state